Начинаем серию статей, посвященных автоколебаниям с точки зрения теории управления. Статьи рассчитаны на подготовленного читателя и несут значительную теоретическую нагрузку, хотя и не включают полного аналитического обоснования всех положений.
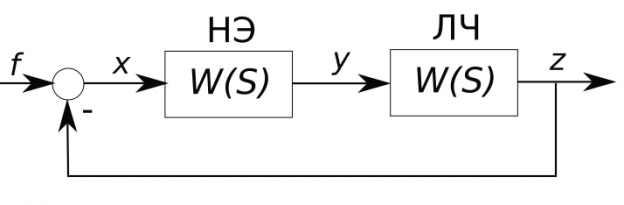
Автоколебания — это периодические процессы в нелинейных системах, часто встречаются в системах. В практике автоматического управления важен автоколебательный режим систем. В нелинейных системах, в отличии от линеаризованных моделей при потере устойчивости не возникает неограниченного роста значений переменных состояния, а при колебательном характере неустойчивости колебания расходятся до амплитуды, определяемой параметрами системы. Кроме того, автоколебательные режимы часто используются для регулирования различных физических параметров технологических процессов, например температуры. При этом учитываются ограничения на допустимые частоты и амплитуды колебаний.
Читать далее →