
Требования к надежности технических систем различного назначения предъявляются с целью обеспечения безопасности или минимизации экономических рисков (потерь, связанных с отказом системы). Обеспечение отказоустойчивости за счет аппаратного резервирования часто неприемлемо или нецелесообразно по экономическим причинам или ограничения массы и габаритов. Альтернативой являются отказоустойчивые системы управления с алгоритмическим резервированием, которые при выявлении неисправности переключаются на специализированный алгоритм. Второй подход (так называемые толерантные системы управления [1]) позволяет сохранить важнейшие характеристики системы при допустимом ухудшении второстепенных.
Различают активный и пассивный подходы к задаче отказоустойчивости управления. Пассивный подход предполагает, что система управления изначально разрабатывается робастной или адаптивной, что позволяет обеспечить адаптацию к изменениям в системе, вызванным неисправностями. При таком подходе класс возможных неисправностей ограничивается «малыми» дефектами.
Основой активного подхода является формирование новых законов управления для компенсации влияния неисправности на систему. Подход является более эффективным, но и более трудоемок в реализации, так как существующие методы требуют предварительного обнаружения, локализации возможных неисправностей и оценки их величины (идентификации). Кроме того, для решения задачи отказоустойчивости при обнаружении неисправности может формироваться управление, обеспечивающее полную развязку с воздействиями, вызывающими дефекты. Несмотря на то, что такой метод эффективен в условиях невозможности (или нецелесообразности) оценки величины дефектов и позволяет сократить временные за-траты на формирование нового управления, зачастую он невозможен в силу структуры системы.
При создании интеллектуальной системы отказоустойчивого управления, фактически, необходимо создать систему, которая должна обладать частичным самосознанием, что может приблизить подобную систему к искусственному интеллекту высшего порядка, т. е. приближенному к биологическому.
Интеллектуализация систем отказоустойчивого управления может иметь несколько направлений:
- интеллектуализация отдельных элементов, включающая:
- диагностирование;
- восстановление;
- супервизорное управление;
- комплексная интеллектуализация, являющаяся итогом работы по перечисленным выше направлениям;
- системная интеллектуализация.
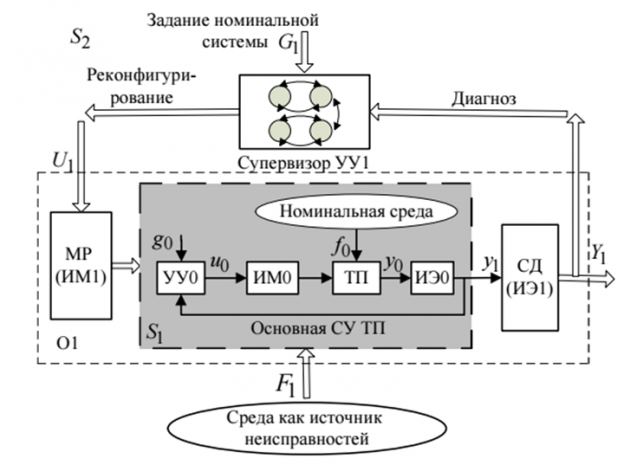
Если первые два раздела в целом понятны, то третий пункт требует пояснения. Под системной интеллектуализацией понимается монолитное интеллектуальное решение, включающее в себя функции диагностики неисправностей и синтеза стратегии устранения неисправности без необходимости составления базы (графа) неисправностей. Причем, система, оснащенная подобным отказоустойчивым регулятором, в целом по своему поведению будет похожа на робастные или адаптивные, хотя в действительности не является таковой.
На данный момент существует два глобальных подхода для интеллектуализации систем: нейросетевое управление и нечеткое управление. Также существует гибридный подход, объединяющий эти направления: neuro-fuzzy управление.
На начальном этапе рассмотрения интеллектуальных отказоустойчивых систем имеет смысл начать с интеллектуализации отдельных элементов. В качестве одного из подходов к интеллектуализации можно предложить следующий:
- На базе телеметрии объекта и системы управления формируется сигнал отсутствия неисправности или вероятность какого-то класса неисправности (например, с помощью ИНС)
- Для каждого идентифицируемого класса неисправности имеется синтезированный для нее «макет» решения неисправности. С помощью средств интеллектуального управления (например, neuro-fuzzy) производится настройка параметров дополнительного регулятора, до оптимальных при конкретных параметрах неисправности.
- По окончанию процесса восстановления переход к шагу 1.
Основным минусом подхода с использованием нейронных сетей является сложность получения большого массива реальных данных для обучения сети, что приводит к необходимости использования данных, полученных путем моделирования неисправности.
Неисправности системы управления и их модели
Возможные неисправности необходимо разделить на два класса: «мягкие» и «жесткие». Жесткие неисправности характеризуются резким (относительно быстрым) изменением параметров или структуры оператора элементов системы управления. Мягкие неисправности характеризуются плавными (относительно медленными) изменениями параметров или структуры операторов. Заметим, что жесткие неисправности более просты в диагностике, так как вносят в динамику системы движения с несвойственными для нее частотными характеристиками. Мягкие же неисправности не вносят значительных изменений в спектр выходных сигналов и значительно более сложны в обнаружении, кроме того, как правило, их обнаружение может требовать значительной продолжительности наблюдений для анализа.
Возможные неисправности можно разделить на сигнальные и системные.
Сигнальная неисправность — неисправность, характеризуемая раз-личными искажениями сигналов в каналах передачи данных, при отсутствии изменений параметров и структуры самого объекта [2]. Сигнальная неисправность непосредственно не влияет на динамику объекта управления, а влияет опосредованно, искажая сигнал в цепи обратной связи, при-водя к некорректной работе системы управления. Несмотря на то, что сигнальные неисправности определяются наличием шумов в каналах передачи данных (как аналоговых, так и цифровых) применение методов цифро-вой обработки сигналов для превентивной фильтрации шумов не является тривиальной задачей из-за того, что спектральная характеристика реального выхода объекта, как правило, не является узкополосной. Однако использование методов цифровой обработки сигналов может быть перспективно в плане диагностики возникновения шумов в канале и фильтрации диагностированных шумов.
Системные неисправности разделяются на параметрические, структурные и топологические [2]. Системная неисправность непосредственно изменяет динамику объекта обеспечения отказоустойчивости.
Список источников
- Diagnosis and Fault Tolerant Control / M. Blanke, M. Kinnaert, J. Lunze, M. Staroswiecki. — Berlin: Springer-Verlag, 2003.
- Шестопалов, М. Ю. Концептуальная модель системы отказо-устойчивого управления технологическими процессами / М. Ю. Шестопа-лов // Изв. СПб. лесотехн. акад. – 2013. – Вып. 205. – С. 162–171.