Заключительная часть цикла вводных заметок в машинное зрение посвящена использованию предобученных сетей в задаче детектирования. В частности использование сетей, обученных на датасете Coco на базе фреймворка TensorFlow Object Detection API.
В отличие от предыдущих статей, которые могли быть выполнены в стандартном окружении Python, эту часть рекомендуется выполнять в Jupyter Notebook, запущеном в контейнере (либо пользоваться облачными сервисами, например colab.research.google.com в силу того, что в процессе будут устанавливаться компоненты.
Установка TensorFlow Object Detection API
Первым делом необходимо установить необходимые компоненты TensorFlow Object Detection API. Для его установки необходимо клонировать репозиторий, скомпилировать модели и запустить тесты.
pip install -U --pre tensorflow=="2.*"
pip install tf_slim
pip install pycocotools
Получите tenorflow/models или cd в родительский каталог репозитория.
import os
import pathlib
if "models" in pathlib.Path.cwd().parts:
while "models" in pathlib.Path.cwd().parts:
os.chdir('..')
elif not pathlib.Path('models').exists():
!git clone --depth 1 https://github.com/tensorflow/models
Скомпилируйте protobufs и установите пакет object_detection
%%bash
cd models/research/
protoc object_detection/protos/*.proto --python_out=.
%%bash
cd models/research/
protoc object_detection/protos/*.proto --python_out=.
Импортируем зависимости и добавим в системные пути расположение TensorFlow Object Detection API
import sys, os
sys.path.append('models/research')
sys.path.append('models/research/object_detection')
import numpy as np
import six.moves.urllib as urllib
import tarfile
import zipfile
import cv2
from PIL import Image
from matplotlib import pyplot as plt
import tensorflow as tf
from object_detection.utils import ops as utils_ops
from utils import label_map_util
from utils import visualization_utils as vis_util
Загрузка предобученной модели
Зададим URL, где хранятся предобученные модели и имя планируемой к использованию модели.
model_path = 'http://download.tensorflow.org/models/object_detection/'
model_name = 'mask_rcnn_inception_v2_coco_2018_01_28'
Создадим переменные среды для работы с путями из shell
os.environ['MODEL_PATH']=model_path + model_name + '.tar.gz'
os.environ['MODEL_FILE_NAME']=model_name + '.tar.gz'
Удалим загруженную ранее модель, если она есть, загрузим модель и распакуем ее.
rm $MODEL_FILE_NAME
wget $MODEL_PATH
tar xfz $MODEL_FILE_NAME
Подготовка модели к запуску
Загрузка модели в память:
model_file_name = model_name + '/frozen_inference_graph.pb'
detection_graph = tf.Graph()
with detection_graph.as_default():
od_graph_def = tf.compat.v1.GraphDef()
with tf.compat.v2.io.gfile.GFile(model_file_name, 'rb') as fid:
serialized_graph = fid.read()
od_graph_def.ParseFromString(serialized_graph)
tf.import_graph_def(od_graph_def, name='')
Загрузка меток классов
label_map = label_map_util.load_labelmap('models/research/object_detection/data/mscoco_label_map.pbtxt')
categories = label_map_util.convert_label_map_to_categories(label_map, max_num_classes=90, use_display_name=True)
category_index = label_map_util.create_category_index(categories)
Воспользуемся следующей функцией для обработки единичного изображения
def run_inference_for_single_image(image, graph):
with graph.as_default():
with tf.compat.v1.Session() as sess:
ops = tf.compat.v1.get_default_graph().get_operations()
all_tensor_names = {output.name for op in ops for output in op.outputs}
tensor_dict = {}
for key in [
'num_detections', 'detection_boxes', 'detection_scores',
'detection_classes', 'detection_masks'
]:
tensor_name = key + ':0'
if tensor_name in all_tensor_names:
tensor_dict[key] = tf.compat.v1.get_default_graph().get_tensor_by_name(
tensor_name)
if 'detection_masks' in tensor_dict:
detection_boxes = tf.squeeze(tensor_dict['detection_boxes'], [0])
detection_masks = tf.squeeze(tensor_dict['detection_masks'], [0])
real_num_detection = tf.cast(tensor_dict['num_detections'][0], tf.int32)
detection_boxes = tf.slice(detection_boxes, [0, 0], [real_num_detection, -1])
detection_masks = tf.slice(detection_masks, [0, 0, 0], [real_num_detection, -1, -1])
detection_masks_reframed = utils_ops.reframe_box_masks_to_image_masks(
detection_masks, detection_boxes, image.shape[0], image.shape[1])
detection_masks_reframed = tf.cast(
tf.greater(detection_masks_reframed, 0.5), tf.uint8)
tensor_dict['detection_masks'] = tf.expand_dims(
detection_masks_reframed, 0)
image_tensor = tf.compat.v1.get_default_graph().get_tensor_by_name('image_tensor:0')
# Запуск поиска объектов
output_dict = sess.run(tensor_dict,
feed_dict={image_tensor: np.expand_dims(image, 0)})
# Преобразование выходных данных из массивов float32 в нужный формат
output_dict['num_detections'] = int(output_dict['num_detections'][0])
output_dict['detection_classes'] = output_dict[
'detection_classes'][0].astype(np.uint8)
output_dict['detection_boxes'] = output_dict['detection_boxes'][0]
output_dict['detection_scores'] = output_dict['detection_scores'][0]
if 'detection_masks' in output_dict:
output_dict['detection_masks'] = output_dict['detection_masks'][0]
return output_dict
Загрузим тестовое изображение
wget https://digiratory.ru/wp-content/uploads/172914606_546132cbe9_z1.jpg
Выведем загруженное изображение
%matplotlib inline
sample_image = cv2.cvtColor(cv2.imread('172914606_546132cbe9_z1.jpg'), cv2.COLOR_BGR2RGB)
plt.imshow(sample_image)
plt.show()
Получим отклик нейронной сети на изображение
output_dict = run_inference_for_single_image(sample_image, detection_graph)
Визуализируем результат детектирования и сегментации.
vis_util.visualize_boxes_and_labels_on_image_array(
sample_image,
output_dict['detection_boxes'],
output_dict['detection_classes'],
output_dict['detection_scores'],
category_index,
instance_masks=output_dict.get('detection_masks'),
use_normalized_coordinates=True,
line_thickness=0,
min_score_thresh=.6)
plt.figure(figsize=(12, 8))
plt.grid(False)
plt.imshow(sample_image)
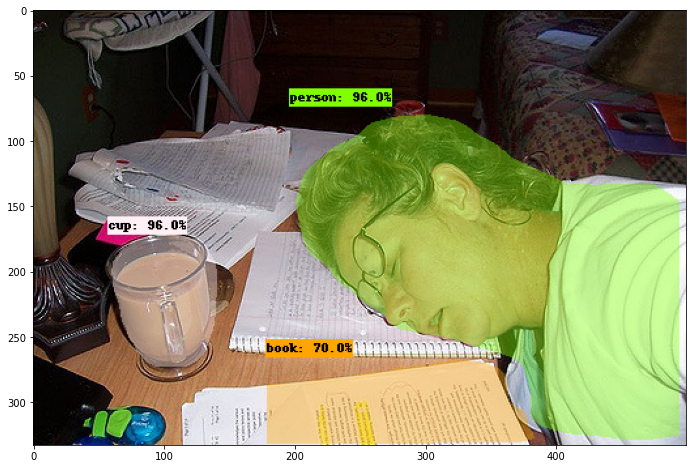
Вы можете попробовать запустить различные предобученные модели, предложенные разработчиками и посмотреть на различие результатов.