Анализ устойчивости систем является одним из важнейших этапов проектирования систем управления, однако при анализе нелинейных, строго говоря, нет метода отвечающего критериям необходимости и достаточности, а критерии являются, как правило только достаточным (для устойчивости). Исходя из этого, для некоторых систем невозможно однозначно говорить о неустойчивости.
В классической теории управления имеется два основных аналитических метода: первый и второй методы Ляпунова, а также достаточно большое количество модификаций второго метода, как не связанного с линеаризацией.
Рассмотрим применение классических методов Ляпунова.
Первый метод Ляпунова
Позволяет судить об устойчивости положения равновесия по линеаризованным уравнениям. Метод основан на утверждениях:
- если собственные значения линеаризованной системы имеют отрицательные действительные части (линеаризованная система асимптотически устойчива), то положение равновесия нелинейной системы устойчиво «в малом»;
- если среди собственных значений линеаризованной системы имеются «правые», то положение равновесия нелинейной системы неустойчиво;
- если имеются некратные собственные значения на мнимой оси, а остальные — «левые», то в этом критическом случае по линеаризованной модели нельзя судить об устойчивости положения равновесия нелинейной системы.
Таким образом для анализа системы по первому методу Ляпунова необходимо:
- Найти положение равновесия системы — движений в системе нет (т.е. скорости и ускорения равны нулю) \[ \frac{\mathrm{d} v_{i}}{\mathrm{d} t}= {0} \]
- Линеаризовать систему в окрестности точки равновесия
- Записать полученное линеаризованное дифференциальное уравнение в матричной форме (составить матрицу А)
- Составить характеристический полином линеаризованной системы: \[ {D(s)}={det(sE-A)} \]
- Найти корни характеристического полинома. По виду корней сделать заключение о характере процессов в системе.
Основными недостатками первого метода Ляпунова являются:
- Если имеется корень на мнимой оси, то невозможно сказать о поведении процессов в системе.
- Возможно говорить только об устойчивости «в малом», т.е. при больших отклонениях от положения равновесия система может быть неустойчивой.
Пример 1.
Исследуем систему описываемую дифференциальными уравнениями:
\[ \left\{\begin{matrix} \frac{\mathrm{d} v_{1}}{\mathrm{d} t}=-v_{1}-2v_{2} \\ \frac{\mathrm{d} v_{2}}{\mathrm{d} t}=2v_{1}-v_{2}-{v_{1}}^{3} \end{matrix}\right. \]
Шаг 1. Положение равновесия:
Для нахождения точек равновесия левые части уравнений приравниваются к 0, что эквивалентно тому, что переменные состояния являются константами, а все их производные равны 0.
\[ \\v_{1}=const \\v_{2}=const \\{v_{1}}^{*}={v_{2}}^{*}=0 \]
Шаг 2. Линеаризация для малых отклонений
Для линеаризации малых отклонений в точке равновесия старшие степени переменных, входящих в уравнения принимаются равными нулю.
\[ \left\{\begin{matrix} \frac{\mathrm{d} v_{1}}{\mathrm{d} t}=-v_{1}-2v_{2} \\ \frac{\mathrm{d} v_{2}}{\mathrm{d} t}=2v_{1}-v_{2} \end{matrix}\right. \]
Шаг 3. Линеаризованное управление в матричной форме
Преобразуем полученную линейную систему уравнений в матричный вид.
\[ A=\begin{bmatrix} -1 & -2 \\ 2 & -1 \end{bmatrix} \]
Шаг 4. Характеристический полином
\[ det(sE-A)=\begin{vmatrix} s+1 & 2 \\ -2 & s+1 \end{vmatrix}=(s+1)(s+1)+4=(s+1)^{2}+4 \]
Шаг 5. Корни характеристического полинома
Приравниваем характеристический полином к 0 и находим корни уравнения.
\[ \\(s+1)^{2}+4=0 \\(s+1)^{2}=-4 \\s+1=\pm 2j \\ s_{1,2}=-1\pm 2j \]
Заключение об устойчивости системы
в данном примере при линеаризации система имеет два корня с отрицательной вещественной частью, т.е. мы можем сказать, что система устойчива «в малом» (при больших отклонениях система может быть неустойчива).
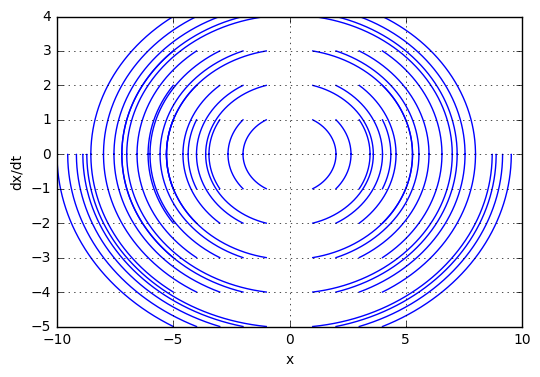
Подтвердим теоретический вывод компьютерным моделированием (построением фазового портрета)
При этом, при начальных условиях, находящиеся дальше от точки равновесия, система становится неустойчивой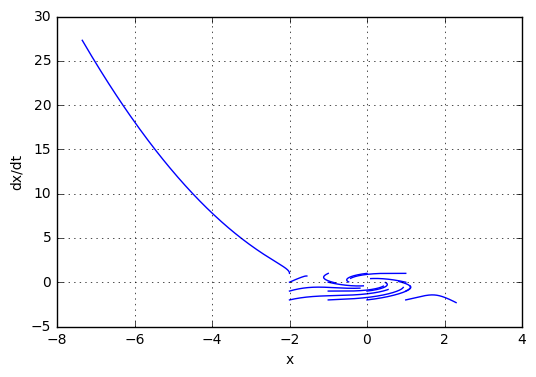
Пример 2. Нелинейный осциллятор
В качестве второго примера рассмотрим нелинейный осцилятор описываемый системой дифференциальных уравнений:
\[ \left\{\begin{matrix} \frac{\mathrm{d} v_{1}}{\mathrm{d} t}=v_{2} \\ \frac{\mathrm{d} v_{2}}{\mathrm{d} t}=-v_{1}-{v_{2}}^{3} \end{matrix}\right. \]
Аналогично первому примеру выполняем последовательность шагов
Шаг 1. Положение равновесия:
\[ \\v_{1}=const \\v_{2}=const \\{v_{1}}^{*}={v_{2}}^{*}=0 \]
Шаг 2. Линеаризация для малых отклонений
\[ \left\{\begin{matrix} \frac{\mathrm{d} v_{1}}{\mathrm{d} t}=v_{2} \\ \frac{\mathrm{d} v_{2}}{\mathrm{d} t}=-v_{1} \end{matrix}\right. \]
Шаг 3. Линеаризованное управление в матричной форме
\[ A=\frac{\mathrm{d} }{\mathrm{d} t}\begin{bmatrix} v_{1} \\ v_{2} \end{bmatrix}=\begin{bmatrix} 0 & 1 \\ -1 & 0 \end{bmatrix}*\begin{bmatrix} v_{1} \\ v_{2} \end{bmatrix} \]
Шаг 4. Характеристический полином
\[ det(sE-A)=\begin{vmatrix} s & -1 \\ 1 & s \end{vmatrix}=s^{2}+1 \]
Шаг 5. Корни характеристического полинома
\[ s_{1,2}=\pm j \]
Заключение об устойчивости системы
Рассматриваемая система является критическим случаем о ее устойчивости невозможно судить по линеаризованным уравнениям, применяемым в первом методе Ляпунова.
Второй метод Ляпунова
Второй метод Ляпунова не связан с линеаризацией системы, поэтому также называется прямым методом.
Для начала необходимо ввести понятия знакоопределенной, знакопостоянной и знакопеременной функций. Пусть имеется функция нескольких переменных:
\[ V=V\left ( v_{1}, v_{2},…, v_{n}\right ) \]
Функция \(V \) называется знакоопределенной в некоторой области, если она во всех точках этой области вокруг начала координат сохраняет один и тот же знак и нигде не обращается в нуль, кроме только самого начала координат
\[ \left ( V\left ( \bar{0} \right )=0 \right ) \]
Функция \(V \) называется знакопостоянной, если она сохраняет один и тот же знак, но может обращаться в нуль не только в начале координат, но и в других точках данной области.
Функция \(V \) называется знакопеременной, если она в данной области вокруг начала координат может иметь разные знаки.
Теорема Ляпунова об устойчивости нелинейных систем
Если при заданных в форме
\[ \left\{\begin{matrix} \frac{\mathrm{d} v_{1}}{\mathrm{d} t}= \varphi _{1}\left ( v_{1}, v_{2},…, v_{n}\ \right ) \\ \frac{\mathrm{d} v_{2}}{\mathrm{d} t}= \varphi _{2}\left ( v_{1}, v_{2},…, v_{n}\ \right ) \\ \vdots \\ \frac{\mathrm{d} v_{n}}{\mathrm{d} t}= \varphi _{n}\left ( v_{1}, v_{2},…, v_{n}\ \right ) \end{matrix}\right. \]
уравнениях системы n-го порядка можно подобрать такую знакоопределенную функцию Ляпунова
\[ V\left ( v_{1}, v_{2},…, v_{n}\right ), \]
чтобы ее производная по времени
\[ W\left ( v_{1}, v_{2},…, v_{n}\right ) \]
тоже была знакоопределенной (или знакопостоянной), но имела знак противоположный знаку \(V\), то данная система устойчива.
Для упрощения скажем, что функция Ляпунова должна быть положительной знакоопределенной функцией. Тогда условия теоремы Ляпунова будут выглядеть следующим образом:
Для устойчивости положения равновесия достаточно существования дифференцируемой функции
\[ V\left ( v_{1}, v_{2},…, v_{n}\right ), \]
называемой функцией Ляпунова, удовлетворяющей в окрестности начала координат следующим условиям:
- \(V\left ( v_{1}, v_{2},…, v_{n}\right ) \geq 0\) причем \(V=0\) лишь при следующем условии, означающем что функция \(V\) имеет строгий минимум в начале координат. \[ \bar{v}= \begin{bmatrix} v_{1} \\ \vdots \\ v_{n} \end{bmatrix} = \bar{0} \]
- Производная функции по времени \[ \frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}=\sum_{i=1}^{n}\frac{\partial V}{\partial v_{i}}\frac{\mathrm{d} v_{i}}{\mathrm{d} t}=\begin{pmatrix} \frac{\partial V}{\partial v_{1}} & \frac{\partial V}{\partial v_{2}} & \cdots & \frac{\partial V}{\partial v_{i}}\end{pmatrix}\begin{bmatrix}\frac{\mathrm{d} v_{1}}{\mathrm{d} t}\\ \frac{\mathrm{d} v_{2}}{\mathrm{d} t}\\ \vdots \\ \frac{\mathrm{d} v_{n}}{\mathrm{d} t}\end{bmatrix} \] в силу дифференциального уравнения \(\frac{\mathrm{d} \bar{v}}{\mathrm{d} t}=\bar{\varphi }\left ( \bar{v} \right ) \) является отрицательной знакопостоянной функцией, т.е. \[ \frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}=grad\bar{V}\cdot \frac{\mathrm{d} \bar{v}}{\mathrm{d} t}=grad\bar{V}\cdot \bar{\varphi}\left ( \bar{v} \right )\leq 0 \] при \(t\geq t_{0}\)
Таким образом, условия:
- \(\frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}\leq 0\) и функция \(V\left ( v_{1}, v_{2},…, v_{n}\right ) \) является положительной знакоопределенной — это является достаточным условием устойчивости
- \(\frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t} \) — отрицательно определенная — это является достаточным условием асимптотической устойчивости.
- \(\left \| v \right \|\rightarrow \infty : \frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}\rightarrow \infty \) — достаточное условие устойчивости «в целом».
Для анализа системы по второму методу Ляпунова необходимо:
- Выбрать функцию Ляпунова от n переменных, где n- порядок системы.
- Найти частные производные по переменным.
- Вычислить производную функции по времени \(\frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}\). Проанализировать полученный знак производной.
Из-за того, что второй метод Ляпунова не связан с линеаризацией, он считается универсальным. Однако он имеет ряд недостатков:
- Нет общих требований по выбору функции V
- Достаточный характер утверждения (если условия не выполняются, то об устойчивости ничего сказать нельзя, а можно посоветовать подобрать другую функцию \(V \))
Пример 3. Нелинейный осциллятор
Проанализируем систему из примера (2).
Шаг 1. Функция Ляпунова
Для начала необходимо выбрать функцию Ляпунова от 2-х переменных (т.к. два вектора состояния):
\[ V\left ( v_{1}, v_{2}\right )=\frac{1}{2}\left ( {v_{1}}^{2}+{v_{2}}^{2} \right ) \]
Шаг 2. Частные производные
\[ \\ \frac{\partial V}{\partial v_{1}}=\frac{1}{2}\left ( 2\cdot v_{1} + 0 \right )=v_{1} \\ \frac{\partial V}{\partial v_{2}}=\frac{1}{2}\left ( 0+ 2\cdot v_{2} \right )=v_{2} \]
Шаг 3. Производная функции
\[ \frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}=\frac{\partial V}{\partial v_{1}}\cdot \frac{\mathrm{d} v_{1}}{\mathrm{d} t}+ \frac{\partial V}{\partial v_{2}}\cdot \frac{\mathrm{d} v_{2}}{\mathrm{d} t}= v_{1}\cdot \frac{\mathrm{d} v_{1}}{\mathrm{d} t} + v_{2}\cdot \frac{\mathrm{d} v_{2}}{\mathrm{d} t} \]
Подставим в выражение значения исходя из ДУ:
\[ \frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}=v_{1}\cdot v_{2}+v_{2}\cdot \left ( -v_{1}-{v_{2}}^{3} \right )=v_{1}\cdot v_{2}-v_{1}\cdot v_{2}-{v_{2}}^{4}=-{v_{2}}^{4}\leq 0 \]
Заключение об устойчивости системы
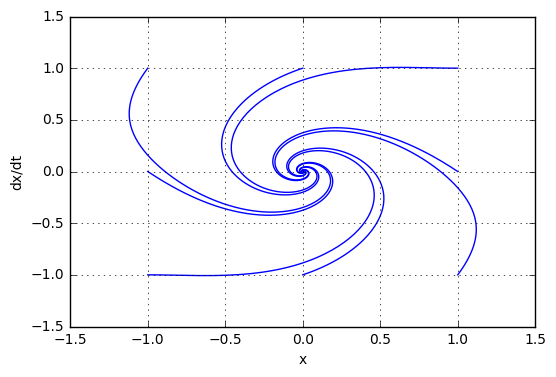
Исследовав систему первым методом Ляпунова мы не смогли сделать конкретный вывод об устойчивости системы, что позволил нам сделать второй метод Ляпунова. В результате мы можем сделать вывод, что система является асимптотически устойчивой.
Аналогично проверим с помощью моделирования:
Пример 4.
Рассмотрим систему, описываемую следующей системой дифференциальных уравнений:
\[ \left\{\begin{matrix}\frac{\partial v_{1}}{\partial t}=-v_{1}\cdot {v_{2}}^{2}\\ \frac{\partial v_{2}}{\partial t}=3\cdot v_{2}\cdot {v_{1}}^{2}\end{matrix}\right. \]
Очевидно, что применение первого метода Ляпунова невозможно, т.к. матрица А состоит из нулей, а, следовательно, собственные значения равны нулю. Поэтому применим второй метод Ляпунова:
Шаг 1. Функция Ляпунова
Выбор функции Ляпунова второго порядка
\[ V\left ( v_{1}, v_{2}\right )= a{v_{1}}^{2}+{v_{2}}^{2} \]
Шаг 2. Частные производные
\[ \\ \frac{\partial V}{\partial v_{1}}=2av_{1} \\\frac{\partial V}{\partial v_{2}}=2v_{2} \]
Шаг 3. Производная функции
\[ \frac{\mathrm{d} V\left ( \bar{v} \right )}{\mathrm{d} t}=2av_{1}\cdot \left ( -v_{1}\cdot {v_{2}}^{2} \right )+2v_{2}\cdot 3 v_{2} {v_{1}}^{2}=-2a{v{1}}^{2}{v_{2}}^{2}+6{v_{1}}^{2}{v_{2}}^{2}\leq 0 \]
При \(a=3\) имеет место асимптотическая устойчивость.
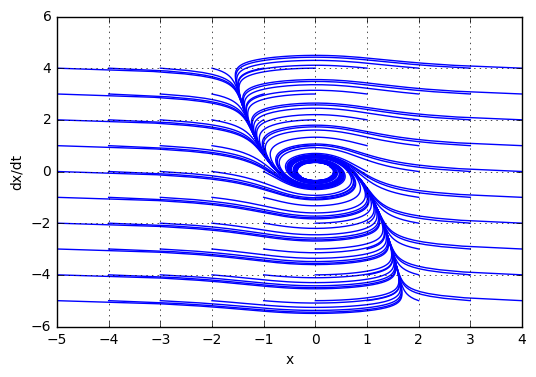
Заключение об устойчивости системы
Система является устойчивой.
Фазовый портрет системы выглядит следующим образом: