

В рамках программы сотрудничества между компанией «Mitsubishi Electric» и кафедрой АПУ СПбГЭТУ «ЛЭТИ» была организована учебная лаборатория. В лабораторию было поставлено оборудование «Mitsubishi».
Для обучения студентов было решено модернизировать данное оборудование для изучения в рамках дисциплин: «Элементы и устройство систем управления», «Технические средства автоматизации и управления», «Электромеханические системы», «Микропроцессорные системы», «Теория автоматического управления». Был разработан план, по которому для некоторых студентов работа над модернизацией стенда стала заданием для выполнения выпускных квалификационных работ, были сконструированы макеты дополнительного оборудования по перечисленным выше учебным курсам.
В настоящем проекте рассматривается работа со стендом, оснащённым преобразователем частоты FR-E720S-030SC-EC и ПЛК AL2-14MR-D.
Авторы проекта: Кондарев Максим Алексеевич, Бабича Кристина.
Постановка задачи
Целью данной конкурсной работы является создание лабораторных работ с использованием стенда на основе оборудования “Mitsubishi” для учебных курсов «Элементы и устройство систем управления» и «Технические средства автоматизации и управления». Данная конкурсная работа основана на выпускных квалификационных работах по направлению «Упарвление в технических системах».
Для достижения поставленной цели необходимо решить следующие задачи:
- Изучение лабораторного стенда и его составляющих
- Разработка комплекса демонстрационных примеров для преобразователя частоты FR-E720S-030SC-EC и ПЛК AL2-14MR-D
- Проектирование модуля переменной нагрузки для асинхронного двигателя
- Монтаж, наладка
Исходными данными для выполнения работы являлись схема принципиальная электрическая, документация изготовителя.
Теоретическое обоснование проекта
Конструкция стенда
Лабораторный стенд состоит из макета рабочего места, оборудованного трехфазным асинхронным двигателем, преобразователем частоты, программируемым логическим контроллером, а также набором различных периферийных устройств. Внешний вид стенда представлен на рисунке 1.1.
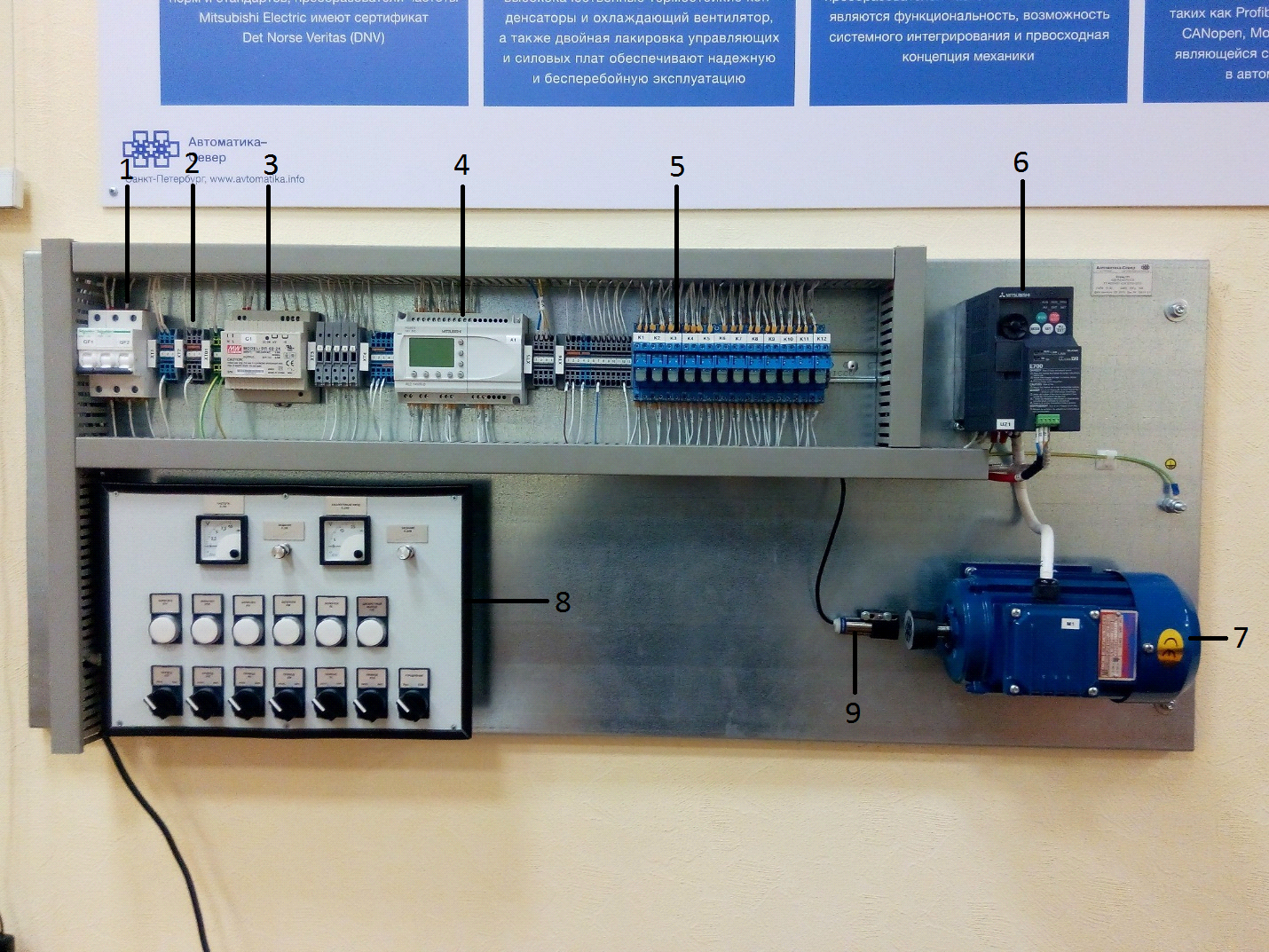
Рисунок 1.1 – Внешний вид и расположение элементов стенда
Осуществить управление и мониторинг различных параметров можно при помощи настольного персонального компьютера и программного обеспечения, установленного на нём.
Данный стенд состоит из следующих компонентов:
- Автоматические выключатели (рис. 1.1, №1) – устройства, предназначенные для коммутации электрической сети, а также для защиты кабелей и проводов от токов перегрузки, и короткого замыкания.
- Клеммники (рис. 1.1, №2) – устройство, предназначенное для упрощения коммутации проводов.
- Источник питания 220/24В 60вт (рис. 1.1, №3) – на данном стенде включен в цепь питания ПЛК после автоматического выключателя QF1.
- Контроллер Mitsubishi Alpha XL Al2-14MR-D (рис. 1.1, №4) – Программируемое логическое устройство, предназначенное для управления двигателем.
- Реле 24VDC 2CO изображены на рисунке 1.1 под номером 5.
- Частотный преобразователь FR-E720S-030SC-EC (рис. 1.1, №6) – устройство, служащее для управления двигателем переменного тока, конвертирующее неизменное напряжение и частоту сети в изменяемое напряжение с изменяемой частотой.
- Асинхронный трёхфазный двигатель 5АИ 63В4 – электродвигатель мощностью 0,37 кВт, изображен на рисунке 1.1 под номером 7.
- Панель ручного управления (рис. 1.1, №8) – служит для ручного управления стендом и состоит из следующих компонентов:
- Потенциометр 1 кОм
- Потенциометр 5 кОм
- Переключатель 2 пол. (6шт)
- Переключатель 3 пол.
- Вольтметр стрелочный 0…10В
- Вольтметр стрелочный 0…25В
- Сигнальная лампа (6 шт)
- Датчик Холла (рис. 1.1, №9) – необходим для подсчета оборотов двигателя.
Стенд имеет два автоматических выключателя, которые коммутируют две независимые друг от друга цепи питания.
Автоматический выключатель под обозначением QF1 предназначен для коммутации цепи питания программируемого логического контроллера, реле, управляющих входов частотного преобразователя. Данная цепь имеет напряжение 24В постоянного тока после источника питания.
Автоматический выключатель под обозначением QF2 предназначен для коммутации цепи питания частотного преобразователя и трехфазного асинхронного двигателя. Данная цепь имеет напряжения 220В переменного тока.
Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Зависимость скорости вращения от нагрузки на валу двигателя называется механической характеристикой асинхронного двигателя. Эта зависимость представлена на рисунке 1.2.
Участок АВ механической характеристики соответствует устойчивому режиму работы асинхронного двигателя. Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
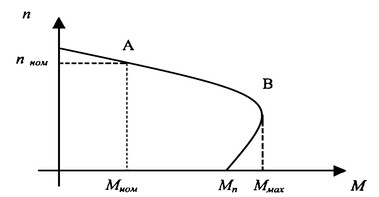
Рисунок 1.2 – Механическая характеристика асинхронного двигателя
С помощью панели управления стендом осуществляется ручное управление направлением и скоростью вращения двигателя, делать экстренный останов и переключать режим управления с ручного на режим управления контроллером. Доступно управление следующими режимами:
- Привод STF\STR – вращение двигателя вправо\влево.
- Привод RH\RM\RL – выбор частоты вращения 50 Гц\30 Гц\10 Гц.
- Привод RES – останов.
- Управление – переключение между режимами ручного и автоматического управления.
- Потенциометр (0…5В) – аналоговый вход преобразователя частоты для управления скоростью вращения двигателя.
- Переменный резистор (0…24В) – аналоговый вход ПЛК.
Контроллер Mitsubishi AL2-14MR-D
Промышленный программируемый контроллер ALPHA XL Mitsubishi Electric предназначен для выполнения функций управления в системах малой точности.
Контроллер реализует управление оборудованием, в соответствии с заданным алгоритмом. Управление происходит посредством замыкания выходных релейных клемм коммутирующих выходную цепь питания.
На питание контроллера подается напряжение 24В постоянного тока, которое обеспечивает блок питания. Контроллер имеет 8 универсальных входов и 6 релейных выходов с возможностью расширения при помощи блока расширения.
Преобразователь частоты FR-E720S-030SC-EC
Данный преобразователь позволяет управлять трехфазными асинхронными двигателями. Преобразуя неизменное напряжение и частоту электросети в изменяемое напряжение с изменяемой частотой, он позволяет бесступенчато изменять частоту вращения двигателя. Преобразователь встраивается в цепь между электросетью и двигателем.
Большой набор технических функций позволяет тщательно настроить систему для оптимального использования как преобразователя, так и двигателя. Рассмотрим наиболее полезные из них: Установка максимальной/минимальной частоты, исключение резонансных частот, автоматический перезапуск после кратковременного исчезновения питания, определение направления вращения, дистанционная настройка, управление тормозом, предустановка частоты вращения (скорости), контактный останов, предотвращение рекуперации, функция статизма, выбор режима управления (U/f-регулирование, оптимальное управление возбуждением, векторное управление (general-purpose magnetic flux vector control) или расширенное управление вектором потока (advanced magnetic flux vector control)), автонастройка данных двигателя, ПИД-регулирование, последовательный обмен данными (RS485), функция «мягкая ШИМ» — для уменьшения «шумов» двигателя. В ситуациях, когда нужен высокий пусковой момент или высокий момент при низкой частоте вращения применяется ручное повышение крутящего момента. С помощью этого параметра можно повысить выходное напряжение при малых входных частотах. При управлении по характеристике U/f и управлении вектором потока имеется возможность путем изменения тока двигателя компенсировать скольжение двигателя, чтобы достичь постоянной частоты вращения. Функция защиты от тока перегрузки осуществляет контроль выходного тока и автоматически изменяет выходную частоту чтобы не допустить нежелательного срабатывания защитной функции вследствие тока перегрузки или повышенного напряжения. Параметр «Скачок частоты» дает возможность исключить резонансные колебания привода. Функция ПИД-регулятора позволяет использовать преобразователь для управления процессами (например, регулирование расхода или давления).
Двигатель 5АИ 63В4
В состав рассматриваемого стенда включен трёхфазный асинхронный двигатель типа 5АИ 63В4. Данная электрическая машина является унифицированной, короткозамкнутый ротор и продолжительный режим работы определяет ее в разряд классических асинхронных двигателей. Непосредственно на стенде двигатель подключен к частотному преобразователю и является объектом управления. В таблице 1.1 приведены основные характеристики данного двигателя.
Таблица 1.1 — Основные характеристики двигателя 5АИ 63В4
Мощность: 0,37 кВт
Частота вращения: 1310 об/мин
Напряжение: 220/380 В
Ток статора: 1.93/1.12 А
КПД: 68%
Коэффициент мощности: 0,70
Мmax/Mnom: 2,2
Mпуск/Мном: 2,1
Iпуск/Iном: 5,2
Класс защиты, IP: 55
Вес: 6,3 кг
Количество полюсов: 4
Двигатель СД-250А
Для расширения возможностей стенда дополнительно был добавлен двигатель постоянного тока СД-250А.
Работа двигателя постоянного тока базируется на принципе взаимного действия магнитных полей статора и ротора.
Рисунок 1.3 – Естественная механическая характеристика двигателя постоянного тока
Практическая реализация проекта
Для составления лабораторной работы были созданы демонстрационные примеры работы оборудования стенда, которые будут наблюдаться студентами при выполнении заданий.
Демонстрационные примеры для изучения преобразователя частоты FR-E720S-030SC-EC
Для демонстрации возможностей частотного преобразователя FR-E720S-030SC-EC был создан пакет примеров. В данном пакете рассматриваются настройки базовых параметров, работа с панелью управления, а также настройка типа управления двигателем.
Управление частотой вращения двигателя с помощью базовой операционной панели управления
Данный пример служит демонстрацией работы с частотным преобразователем посредством панели управления. Рассматривается внешний вид панели управления, значения функциональных клавиш, установка параметров преобразователя, запуск/останов двигателя.
На рисунке 3.1 изображен внешний вид панели управления.
На панели присутствует светодиодная индикация в виде четырехзначного семи-сегментного индикатора для вывода рабочих параметров, а также единичные индикатора состояния частотного преобразователя.
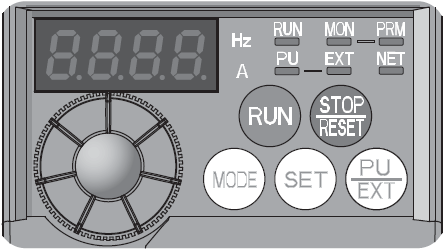
Рисунок 3.1 — Внешний вид панели управления
Клавиши управления и их функции:
- Диск цифрового набора способен вращаться в двух направлениях, кроме того, диск имеет функцию клавиши. С помощью данного диска можно устанавливать значения параметров, осуществлять выбор.
- Клавиша RUN осуществляет запуск двигателя в выбранном направлении вращения
- Клавиша STOP/RESET служит для остановки двигателя
- Клавиша MODE служит для переключения режимов настройки частотного преобразователя, а также для блокировки панели управления
- Клавиша SET производит установку выбранного значения необходимого параметра и для переключения режимов монитора
- Клавиша PU/EXT осуществляет перевод частотного преобразователя из режима управления с пульта (PU) во внешний режим управления (EXT) и наоборот
Для запуска двигателя необходимо с помощью панели управления изменить значение параметров:
- Номер параметра 79: необходимое значение 6
- Номер параметра 161: необходимое значение 1
После установки параметров с помощью диска цифрового набора нужно установить необходимую частоту, после чего нажать клавишу RUN двигатель при этом начнет вращаться с заданной частотой. Для остановки двигателя следует нажать на клавишу STOP/RESET.
Предотвращение явлений резонанса. Скачок частоты. Уменьшение шумов двигателя
Данный пример демонстрирует возможность предотвращения явления резонанса посредством исключения резонансных частот и уменьшение шумов двигателя.
Для устранения резонансных колебаний привода, необходимо использовать параметры 31-36 для установки промежутков частот, которые частотный преобразователь будет «перепрыгивать». Диаграмма изменения выходной частоты с использованием параметров 31-36 представлена на рисунке 3.2.
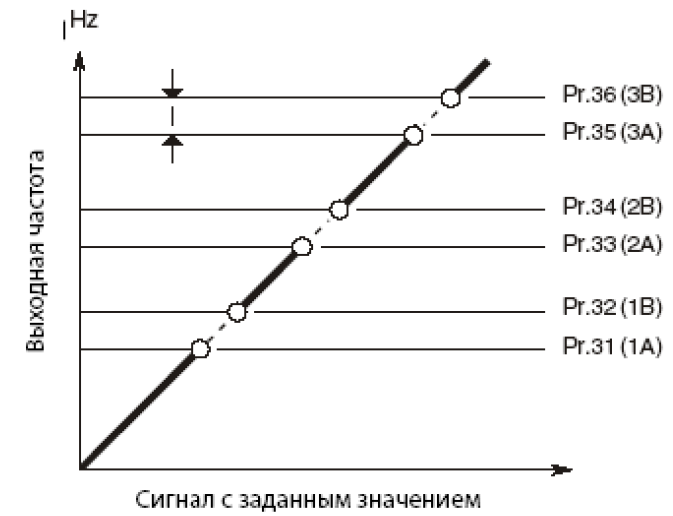
Рисунок 3.2 — Диаграмма изменения выходной частоты
В таблице 3.3 приведены параметры и значения, которые необходимо установить.
Таблица 3.3 — Параметры для настройки
Параметр — Значение
31 Скачок частоты 1А — 25
32 Скачок частоты 1В — 30
33 Скачок частоты 2А — 40
34 Скачок частоты 2В — 32
35 Скачок частоты 3А — 53
36 Скачок частоты 3В — 58
72 Функция ШИМ — 2
240 Мягкая ШИМ — 1
260 Регулирование тактовой частоты ШИМ — 1
Изменение значений параметров 72, 240, 260 необходимо для устранения механических шумов двигателя. Установка значения параметра 72 «Функция ШИМ» позволяет уменьшить вибрацию, вызванную резонансными колебаниями двигателя, уменьшить токи утечки, путем изменения тактовой частоты. Параметр 240 «Мягкая ШИМ» позволяет уменьшить механические шумы двигателя. Параметр 260 «Регулирование тактовой частоты ШИМ» позволяет поддерживать тактовую частоту ШИМ независимо от нагрузки.
В результате вышеперечисленных действий шумы двигателя наглядно уменьшились.
Расширенное управление вектором потока
Для данного преобразователя существует три способа управления двигателем: Управление по характеристике U/f, расширенное управление вектором потока и управление вектором потока.
Рассмотрим параметры, значения которых необходимо изменить, чтобы переключить тип управления на расширенное управление вектором потока. Для удобства все параметры сведены в таблицу 3.4.
После установки приведенных ниже параметров, тип управления изменится на «Расширенное управление потоком».
аблица 3.4 — Параметры для настройки
Параметр — Значение
9 «Установка тока электронной защиты двигателя» — 2
71 «Выбор электродвигателя» — 13
80 «Номинальная мощность двигателя» — 0,37
81 «Число полюсов двигателя» — 4
83 «Номинальное напряжение двигателя» — 220
Демонстрационные примеры для изучения техники программирования контроллера AL2-14MR-D компании «Mitsubishi Electric»
Задание временной программы управления скоростью вращения двигателя
Вид окна программы представлен на рисунке 3.3 и демонстрирует работу релейных выходов микроконтроллера, изменяя со временем скорость и направление вращения двигателя.
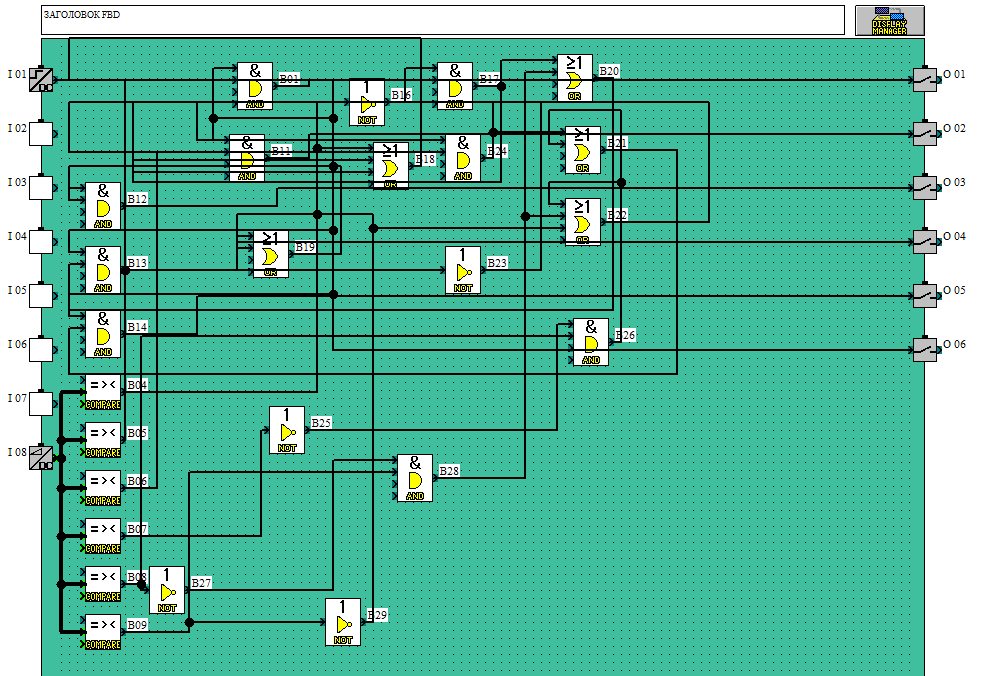
Рисунок 3.3 — Программа, показывающая работу релейных выходов ПЛК
Программное задание скорости вращения двигателя через аналоговый вход
Вид окна программы представлен на рисунке 3.4 и демонстрирует совместную работу аналогового входа и релейных выходов. Изменяя положение ручки потенциометра, расположенного на стенде ручного управления, происходит изменение скорости и направления вращения двигателя.
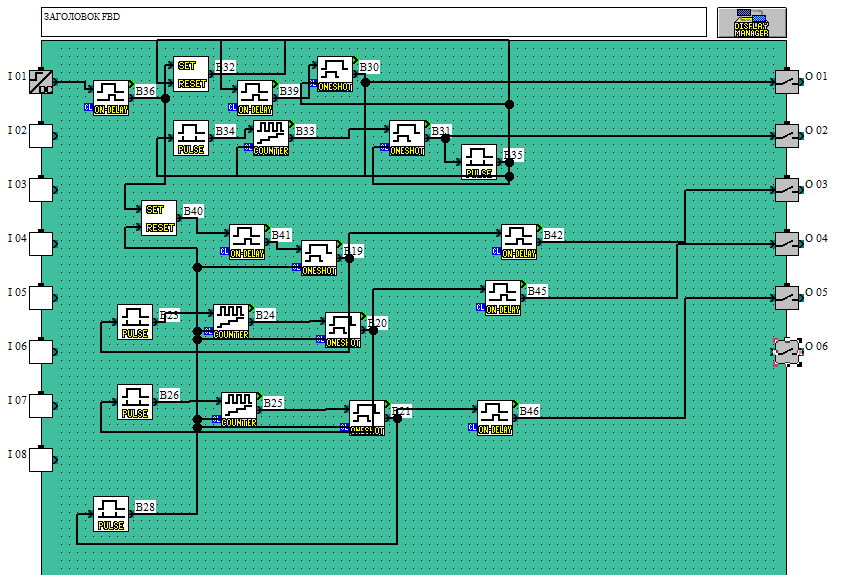
Рисунок 3.4 — Программа, показывающая работу аналогового входа ПЛК
Демонстрация работы аналогового выхода контроллера
Вид окна программы представлен на рисунке 3.5 и показывает работу аналогового выхода контроллера, который подает токовый сигнал на аналоговый вход преобразователя, тем самым плавно изменяя скорость вращения двигателя.
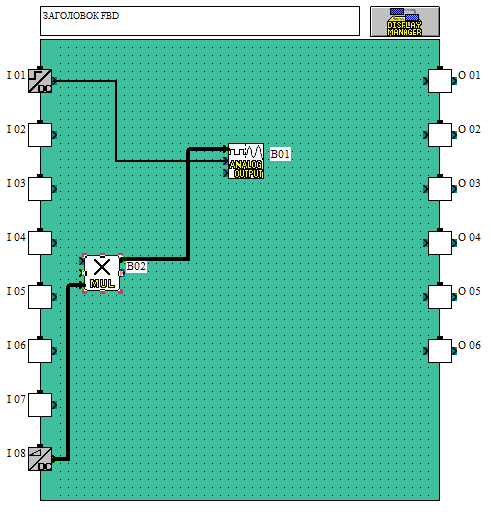
Рисунок 3.5 — Программа, показывающая работу аналогового выхода ПЛК
Измерение скорости вращения с помощью дискретного датчика Холла
Вид окна программы представлен на рисунке 3.6 и демонстрирует работу скоростного модуля, подсчитывая импульсные сигналы, исходящие от датчика Холла, тем самым определяя скорость вращения вала двигателя.

Рисунок 3.6 — Программа, показывающая работы скоростного модуля
Разработка конструкции и принципиальной схемы модуля управляемой нагрузки
За основу модуля управляемой нагрузки был взят двигатель постоянного тока СД-250А с независимым возбуждением, подключенный в режиме динамического торможения. В режиме динамического торможения якорная обмотка двигателя отключена от сети и замкнута на тормозной резистор. При таком режиме механическая энергия якоря преобразуется в электрическую и расходуется на нагрев резистора и остальных частей якоря. При этом обмотка возбуждения должна быть подключена к сети. Схема такого подключения приведена на рисунке 3.7.

Рисунок 3.7 — Динамический тормозной режим двигателя постоянного тока независимого возбуждения
В режиме динамического торможения ЭДС якоря не меняет своего направления, однако, якорь отключен от сети, из чего следует, что ток якоря изменит направление и станет отрицательным. Как результат, электромагнитный момент также изменит направление и станет тормозящим.
Для закрепления двигателя на стенде в среде Компас 3D были спроектированы и изготовлены при помощи 3D принтера крепления. Для подачи питания на обмотку возбуждения на стенд был добавлен блок питания 24 V 1.1A. Для осуществления переменной нагрузки в цепи якоря на стенд был добавлен магазин сопротивлений. Двигатели были соединены при помощи муфты.
Внешний вид стенда после модернизации приведён на рисунке 3.8. Общая принципиальная схема электрическая модуля управляемой изображена на рисунке 3.9.
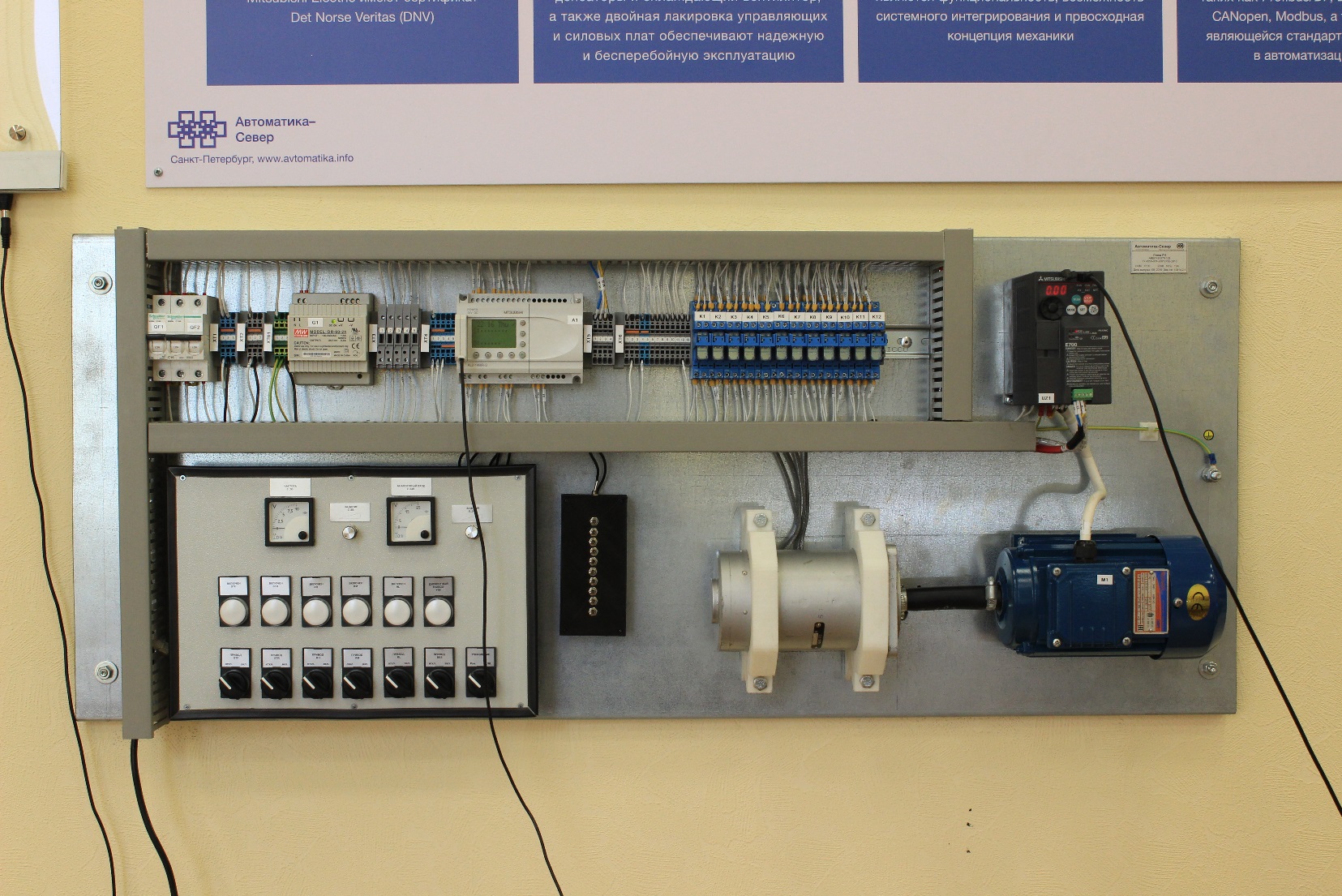
Рисунок 3.8 – Внешний вид модернизированного стенда
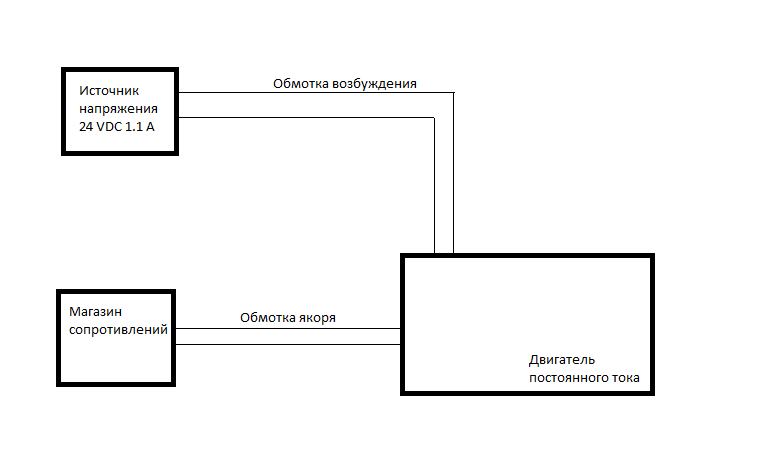
Рисунок 3.9 — Общая принципиальная схема электрическая модуля управляемой нагрузки
Разработка принципа построения лабораторной работы
При выполнении лабораторной работы студентами будут получаться как теоретические знания о характеристиках различных типов двигателей, так и практические навыки работы с оборудованием стенда.
В первой, теоретической части предлагается ознакомиться с основными принципами работы контроллера Mitsubishi AL2-14MR-D, преобразователя частоты Mitsubishi FR-E720S-030SC-EC, двигателем 5АИ 63В4 и двигателем СД-250А.
Вторая, практическая часть работы требует измерения характеристик двигателя постоянного тока и асинхронного двигателя, а также идентификации системы, построение следящей системы.
Студенты должны построить характеристику каждого двигателя по заданным характеристикам другого двигателя, а также при изменяемой нагрузке поддерживать количество оборотов.
Тестирование или апробация
Было произведено исследование работы двигателя с подключенным модулем управляемой нагрузки.
За основу модуля управляемой нагрузки взят двигатель постоянного тока с независимым возбуждением. Для построения нагрузочной характеристики двигателя была произведена серия экспериментов.
Экспериментальным путем снято напряжение в обмотке якоря при различных добавочных сопротивлениях и скорости вращения вала двигателя. Для каждого опыта были выставлены значения выходной частоты на преобразователе частоты равные 100Гц, 70Гц, 50Гц, 30Гц, 10Гц, при этом, для каждой из указанных частот были установлены добавочные сопротивления обмотки якоря 90 Ом, 80 Ом, 70 Ом, 60 Ом, 50 Ом. Для построения нагрузочной характеристики, были рассчитаны ток якоря и тормозной момент по формулам ниже \(.\)
\[ { I}_{я} =\frac{{U}_{я}}{{R}_{я} + {R}_{доб}} \]
\[ {М}_{т} = k Ф {I}_{я} , где \]
\[ kФ=\frac{{М}_{ном}}{{I}_{я}} =0,06 \]
Значения $latex {М}_{ном }$ и $latex{ I}_{я} $ были взяты из паспортных данных двигателя СД-250 А.
Используя полученные экспериментально значения напряжения якоря, рассчитаем ток в обмотке якоря и сведем результаты в таблицу 4.1.
Таблица 4.1 — Ток якоря при различных значениях нагрузки и частоты
| V\R | 100 Гц | 70 Гц | 50 Гц | 30 Гц | 10 Гц |
| 50Ом | 0,29 А | 0,36 А | 0,25 А | 0,15 А | 0,047 А |
| 60 Ом | 0,32 А | 0,3 А | 0,21 А | 0,12 А | 0,04 А |
| 70 Ом | 0,36 А | 0,26 А | 0,18 А | 0,11 А | 0,035 А |
| 80 Ом | 0,42 А | 0,23 А | 0,16 А | 0,097 А | 0,031 А |
| 90 Ом | 0,5 А | 0,2 А | 0,14 А | 0,087А | 0,028 А |
Используя рассчитанные значения тока обмотки якоря, рассчитаем значения тормозного момента и сведем в таблицу 4.2.
Таблица 4.2 — Тормозной момент на валу двигателя
|
V\R |
100 Гц |
70 Гц |
50 Гц |
30 Гц |
10 Гц |
|
50 Ом |
0,03 Н*м |
0,0216 Н*м |
0,015 Н*м |
0,015 Н*м |
0,00282Н*м |
|
60 Ом |
0,0252 Н*м |
0,018 Н*м |
0,0126 Н*м |
0,0126 Н*м |
0,0024Н*м |
|
70 Ом |
0,0216 Н*м |
0,0156 Н*м |
0,0108 Н*м |
0,0108 Н*м |
0,0021Н*м |
|
80 Ом |
0,0192 Н*м |
0,0138 Н*м |
0,0096 Н*м |
0,0096 Н*м |
0,00186Н*м |
|
90 Ом |
0,0174 Н*м |
0,12 Н*м |
0,0084 Н*м |
0,0084 Н*м |
0,00168Н*м |
На рисунке 4.1 изображен график нагрузочной характеристики двигателя постоянного тока. Нагрузочная характеристика двигателя постоянного тока имеет линейный характер, поэтому была произведена аппроксимация полученных значений.
На рисунке 4.2 рассматривается совместная работа асинхронного двигателя с нагрузкой на валу – разработанным модулем переменной нагрузки. Модуль переменной нагрузки (рисунок 3.8.а) соединяется с валом двигателя и при вращении создает момент нагрузки. При изменении нагрузки на валу изменяется частота вращения ротора, токи в обмотках ротора и статора и потребляемый из сети ток. Работа двигателя с нагрузкой Mнагр1 в точке 1 представлена на рисунке 4.2.б. При увеличении нагрузки на валу до значения Mнагр2, рабочая точка переместится в точку 2. При этом частота вращения ротора снизится (n2<n1), вращающий момент возрастет (M2 > M1). Снижение частоты вращения ротора приводит к увеличению скольжения, увеличению токов в обмотках ротора и статора, т.е. к увеличению потребляемого из сети тока, что продемонстрировано на рисунке 4.3.
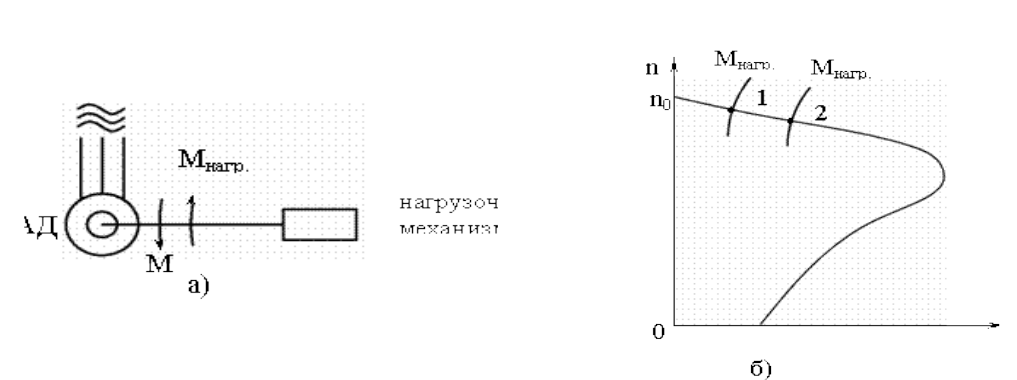
Рисунок 4.2 – Совместная работа асинхронного двигателя и модуля переменной нагрузки
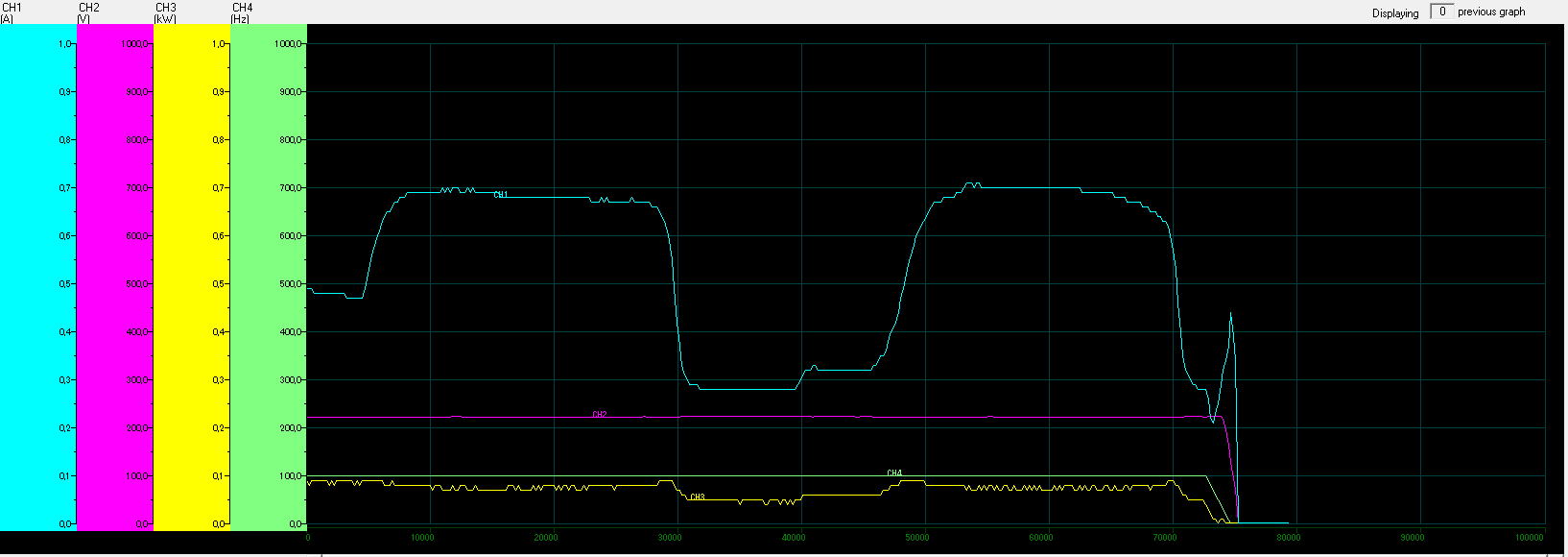
Рисунок 4.3 – Изменение тока при изменении нагрузки
Экономическая эффективность разработки (проекта)
Стенд на базе оборудования Mitsubishi Electric, рассматриваемый в рамках данной конкурсной работы предназначен для использования оборудования в учебных целях для составления лабораторных работ курсов «Элементы и устройство системы управления» и «Технические средства автоматизации и управления». Экономическая эффективность использования стенда в учебном процессе не оценивалась.
Заключение
В ходе выполнения поставленных задач был изучен обучающий стенд, включающий в себя преобразователь частоты и программируемый логический контроллер. Были рассмотрены принципы построения и программирования данных устройств, изучены возможные режимы работы. Для расширения возможностей стенда был разработан модуль управляемой нагрузки на основе двигателя постоянного тока.
Стенд был модернизирован, был произведён монтаж дополнительного двигателя, наладка работы оборудования.
Разработанные комплексы демонстрационных примеров нашли применение в лабораторной работе в рамках учебных курсов «Элементы и устройство системы управления» и «Технические средства автоматизации и управления».